December 3
Group meeting 17
During this meeting, the group prepared for the final presentation. The group split the task between members. Also, they keep testing and evaluate the hopper.
November 30
Group meeting 16
That meeting was the last meeting on the lab before the presentation. During this meeting, the group keep testing the project and summarize all the work that they have done for this project.The project works well. The hopper jumps and landing safety, which was the goal of the project. Overall, the group checked each detail it they in good condition.
November 29, 2015
Group meeting 15
This time, the group has everything done to making the test of jumping and landing. During testing the project group has faced the problem that four legs moving not at same time left side is faster then right side, the group thought it happened because to the right part is connected the remote control, which changing the direction of the gears. To fix this problem isn't easy because to find the motor with that difference of the power will not possible just maybe if order the custom motor for which the group don't have a time and budget. To fix this problem group decided to connect the first to legs together and second to leg together. That idea works hopper is jumping, but the occurred the other problem hopper flipping over. as the group have thought it because the weight of the two motors on the back of the machine is much bigger than on the front so it make the hopper flipping over. To avoid this the group deciding to put some weight on the front and to be sure it wouldn't flipping over the group decided to add on the back of the project the long sticks, which help the hopper to keep right position and to secure the hopper's landing. The group has test it several times and it really was the problem. Now, hopper jumping and landing well as the group has expected it.
This video shows the working process of the jumping machine.


November 26, 2015
Group meeting 14
Group meeting 17
During this meeting, the group prepared for the final presentation. The group split the task between members. Also, they keep testing and evaluate the hopper.
The Hopping machine project ended successfully, satisfying all of the major project constraints. The hopping machine is able to autonomously jump and land based on the rotation of a motor. The machine uses four legs to accomplish this and achieves a jumping height of approximately two inches.
The team had roughly three iterations of the design process, which took around four weeks after the project had been planned and proposed. The schedule, as well as the building materials, used allowed for these adjustments and because of that the project was able to be delivered on time. The project also required $24 less than the budget allowed for.
The final video of the project that group has posted on YouTube
The final video of the project that group has posted on YouTube
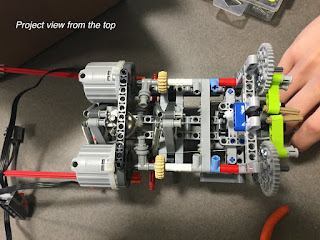
Experimentation with the release mechanism yielded an arrangement of slipping gears which were attached to the legs by 6 lbs. test fishing line. This line was chosen for its virtually frictionless qualities. The gear arrangement extends outwards from the center of mass of the device in order to be able to pull the leg assemblies forwards and up.
This arrangement fits the demands of the motor in regards to mechanical advantage, and also allows the legs to return to their extended position before the teeth of the smaller gear reengage on the larger one. Each motor is responsible for operating two leg assemblies, making the left and right sides somewhat independent of each other. As the motors turn the green pieces are rotated to the outside of the device, pulling on the fishing line and bringing the legs into their compressed position. At this point the springs are in tension. When the teeth of the smaller gear break contact with the teeth on the larger gear, the tension in the springs causes the legs to push downward and propel the machine away from the ground. While this is happening, the larger gears are unwinding back to their starting position, until the bare patch of the small gear passes and the teeth reconnect.
Also visible in this picture are two additional pieces of plastic added to the legs, which connect the left and right sides and aid in the synchronization of the leg sets and motors. If one set of legs were to release sooner than the other, the machine would flip over to its side.
On this photo shows the slipy gears system

On this photo shows the slipy gears system

November 30
Group meeting 16
That meeting was the last meeting on the lab before the presentation. During this meeting, the group keep testing the project and summarize all the work that they have done for this project.The project works well. The hopper jumps and landing safety, which was the goal of the project. Overall, the group checked each detail it they in good condition.

November 29, 2015
Group meeting 15
This time, the group has everything done to making the test of jumping and landing. During testing the project group has faced the problem that four legs moving not at same time left side is faster then right side, the group thought it happened because to the right part is connected the remote control, which changing the direction of the gears. To fix this problem isn't easy because to find the motor with that difference of the power will not possible just maybe if order the custom motor for which the group don't have a time and budget. To fix this problem group decided to connect the first to legs together and second to leg together. That idea works hopper is jumping, but the occurred the other problem hopper flipping over. as the group have thought it because the weight of the two motors on the back of the machine is much bigger than on the front so it make the hopper flipping over. To avoid this the group deciding to put some weight on the front and to be sure it wouldn't flipping over the group decided to add on the back of the project the long sticks, which help the hopper to keep right position and to secure the hopper's landing. The group has test it several times and it really was the problem. Now, hopper jumping and landing well as the group has expected it.
This video shows the working process of the jumping machine.
This photo shows the final view of the hopper machine


November 26, 2015
Group meeting 14
The step that group has done that test and evaluate the legs. As on the video below shown the process of working on of the half of the hopping machine
The working process of the legs
November 24, 2015
Group meeting 13
On the meeting 13, the group decided to create a "mirror " of the project which will help the project land easily. As a result of that the hopper should have 4 legs by using 4 springs and 2 xl motors. it will help the hopper to land safely on four legs. To do so the group needs another LEGO's XL motor and the same part of the LEGO's as the group used for the first part of the project. It will easy to do because the group has already experience with this kind of work. So there shouldn't occur any issue with that. The half of the project work well, but the problem is will landing.
On the images below shown the result how should the "hopper " look like. The next step that this group planning to do that to connect legs with streak line to the motor and make sure they all working parallel and at the same time.
The final view of the body that group want to keep


November 15, 2015
Group meeting 12
The group have met to evaluate the project and testing. Also, group have made a few photo of the entire view of the hopping machine.
On Figure 1 shows the prototype of the model that how it should look.

Figure 1
Figure 2, shows the working process of the gears that work though the XL motors

Figure 2
On Figure 3, shows the leg which is connected to the springs and XL Motors what allows a model to jump.

Figure 3
The Figure 4, shows lock position of the leg.

Figure 4
November 12, 2015
Group meeting 11
The group keep they weekly meeting beside the class to work on the project more intensively.
The group have faced the problem that mechanism wasn't able to jump. So the group decided to change a little bit a body and make it lighter and that will give the stings more force. The body get the different look, but now it looks more like a grasshopper. The hopper was built by using the LEGO part which is mimic the body of the project also, it includes two XL LEGO Motors which is connected to springs and legs that are built from the Lego’s parts. The first jump of the hopper was weak because the body of the mechanism was heavy and the spring doesn't have enough force to make it jump. Over the weekend, the group have tried several different ways and calculation to figure out have improved the solution. Finally, the group come up with an idea to rebuilt the body and make it lighter as a result of that, it will give the springs more force to jump. The power hopper will receive from two motors, which will be attached to each leg. The motors will be connected to the 9 Volt Lego’s battery. Such as battery is heavy group have decided to attach the long extension to the motors and placed the battery on the wheels. That will give the battery ability to follow the hopper and will let hopper make the safe jump and land. However, the spring is attached to each foot and gears. The hopper has a four legs that give mechanism the stability to land safer. The motors are operating the legs by uncock and cock the legs back by it selves. The hopper makes jump about 6 inches and has landed by coking legs back and it has the ability to repeats that process several times. Each hopping cycle is about 4 seconds. The biggest accomplishing was to make it jump and land safely.
Here the group has provided a video of the way how the legs will work
November 9, 2015
Group meeting 10
This meeting group tested the XL LEGO motor to see the torque. The motors having a good torque's moment. Those motors will make the mechanism to jump. The group will put two the same size motors on each of the legs. The other thing that group have done on this meeting it is a concept sketch which will give the reader an idea how the final project should look like.
 |
 |
 |

 |
| Add caption |
November 8, 2015
Group meeting 9
The group continues to work on a way to make the spring in the mechanisms leg charge and discharge. During the meeting, they found a video that displays a viable method of doing so. The video relates to a gun, but the mechanism that it uses for stretching its rubber bands has a good chance of working for the jumping machine as well.
The next meeting will be in the lab section. By that time, the group will have to finish building the prototype and concentrate on the testing, adjustments and evaluation. After all, the group have to start their final report preparation.
November 4, 2015
Group meeting 8

 |
November 1, 2015
Group meeting 7
The group holds their weekly meeting outside of class to work on the project. Here the group has all the parts and tried to build the first leg. The group is using mainly LEGO parts for this task. The group built the first leg, but there was a problem with the spring. The spring didn't give us the strength that was required. As a result, the group decided to get stronger springs.
The next meeting is going to be in Monday lab's class.
The building process

The motor and 9-v Battery that should be used for the project

November 1, 2015
Group meeting 6
The group met on Monday on the lab. The main thing that group work on was project's documentation what is also very imported part of the Engineering projects. The group has listened a feedback from the professor on the proposal and worked on improving that.
The next group meeting scheduled on Thursday as usual. For that meeting group has to get all the part that need for the project and start built that.
October 25, 2015
Group meeting 5
Discussion on Rubber Bands vs. Springs
The following meeting group come up with a problem that rubber bands don't follow hookes law which means that the force that produce is not directly proportional to the stretch it displacement put on them. So group come up with an idea to replace the rubber bands to springs. The springs do follow hooks law and, therefore, are more predictable. Also, rubber bands produce more force when they are charged and discharged instantaneously, whereas springs can hold their energy for longer without it dissipating.
However, the group decided to use springs instead of rubber bands and the other part of the body will use lego parts and an xl motor. As a result of all this change the group budget has reduced to 30 dollars. Also, the group has to draw a figure that more likely looks like a future project.

In conclusion, over the weekend group planning to visit a lego store and but all the parts that are required for the project and work on designing. The next step it to decide how much power our prototype needs, but it hard to say until we don't have a model done.
October 25, 2015
Group meeting 4
The group has met fifth time on the lab section. On the day group was divided by two groups which include three members. The Group 04 whose is now of three people keep posting this blog.The groups have a chance to stick with the same project, but to do it separately.
During the lab, the group have looked over the design and decided that it can base off of a grasshopper. However, the group initially wanted to mimic all of its muscles, but the Dr. Abdel-Aal said the we were making it to specific because after all we need to think about how we can apply our design to the real world. Also, the doctor has mentioned that there is a difference between mimicking a thing exactly and mimicking its function. We change our approach from exact mimicry to functional mimicry to allow us to design and build the project more easily.
Next meeting planning to be on October 22.
October 18, 2015
Group meeting 3
Choosing the project
Group have met with the coordinator to ask some advice about two ideas that they have come up with because the both ideas were very interesting. As was mention before the first idea was Grasshopper, which showed on Figure1. The second idea was the jumping machine in a kangaroo's leg, which shown on Figure 2.

Figure 1

Figure 2
Finally, the idea that has chosen is a grasshopper machine. The main goal of the machine is to create an energy storage device with the intention of using it to build a machine with the ability to jump. The design is based on the leg muscle of the grasshopper. The grasshopper's jumping abilities are interesting they rely on a mechanical disadvantage in the typical sense. The muscle of the grasshopper has to provide a (relatively) very large thrust in order to supply enough force to create lift after that force has been diminished in magnitude by the lever in its leg. To do this, the muscle is not aligned directly with the axis of movement. Instead, the fibers come off of the axis at an angle, and all work together to create a much shorter but far more powerful movement.
In addition, the group has talked about the budget. We all have decided to put $25.00 each towards the project wich leaves us with $150.00 to spend on mechanical hardware and servo motor and component.
In addition, the group has talked about the budget. We all have decided to put $25.00 each towards the project wich leaves us with $150.00 to spend on mechanical hardware and servo motor and component.
Overall, on the next meeting group planning to discuss building energy storage device and building prototype.
October 9, 2015
Group 04 Meeting 2 - Thursday, October 8, 12:00 pm
The group met in room 226 of the Library to discuss our findings. Three separate proposals were submitted.
The first idea was to use an electromagnetic field to propel a projectile out of a solenoid, producing upward lift. The group decided that it was in our best interest to attempt to mimic biology more closely.
The second was to mimic the jumping mechanism in a kangaroo's leg, using an arm attached to a periodic motion device to move a spring powered assembly around a track. The track had a curved section that allowed the spring arm to be compressed and a straight vertical section where the spring was free to decompress and thereby produce lift.
The third proposal was to mimic the muscle in the leg of a grasshopper. The muscle produces a strong force over a short distance, which is applied to the short side of a lever. The lever acts on a fulcrum to reduce the overall force but increase the distance that the force acts over, thereby producing lift. A member of the group suggested a periodic motion device with a short channel along the path of the motion, which would allow the device to charge the spring in the arm while still allowing it to discharge.
Overall, the group decided to further investigate the second two design options and meet with the teaching fellow to discuss the pros and cons of each. The next meeting time is to be determined by email when the fellows office hours become known. The group will hold it's next weekly meeting regardless on Thursday, October 15 at 12:00 pm.
October 8, 2015Group 04 Meeting 1 - Monday, October 5, 2:00 pm
A group of 6 was formed and early discussion of design proposals began. Biomimicry was suggested as a tool to help with the design process. The group agreed to create a spider based hopping machine. The group decided to research different animals and insects individually and to meet back on Thursday, October 8 at 12:00 pm to discuss our findings.
No comments:
Post a Comment